CONTROL LOOP DIAGRAMS
Process Controls
Control loops can be either stable or unstable. Instability is caused by a combination of process
time lags discussed earlier (i.e., capacitance, resistance, and transport time) and inherent time lags
within a control system. This results in slow response to changes in the controlled variable.
Consequently, the controlled variable will continuously cycle around the setpoint value.
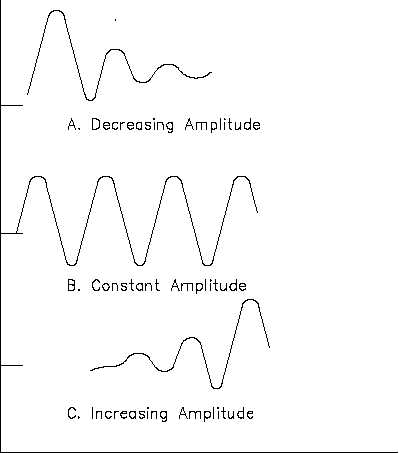
Oscillations describes this cyclic characteristic. There are three types of oscillations that can
occur in a control loop. They are decreasing amplitude, constant amplitude, and increasing
amplitude. Each is shown in Figure 10.
Decreasing amplitude (Figure 10A). These oscillations decrease in amplitude and eventually stop
with a control system that opposes the change in the controlled variable. This is the condition
desired in an automatic control system.
Figure 10 Types of Oscillations
IC-07
Page 14
Rev. 0