Process Controls
PID CONTROL SYSTEMS
You must remember that these response curves are drawn assuming no corrective action is taken
by the control system. In actuality, as soon as the output of the controller begins to reposition
the final control element, the magnitude of the error should begin to decrease. Eventually, the
controller will bring the error to zero and the controlled variable back to the setpoint.
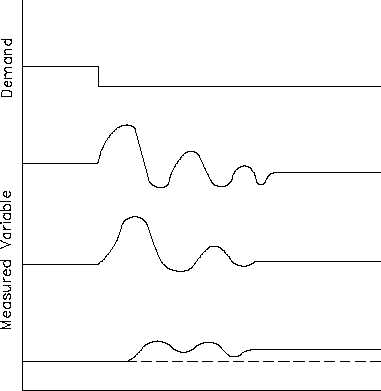
Figure 31 demonstrates the combined controller response to a demand disturbance. The
proportional action of the controller stabilizes the process. The reset action combined with the
proportional action causes the measured variable to return to the setpoint. The rate action
combined with the proportional action reduces the initial overshoot and cyclic period.
Figure 31 PID Controller Response Curves
Rev. 0
Page 45
IC-07